
摘要
本文主要针对海事、渔业和港口等部门对船舶航行管理系统(VMS)的需求不断上升的问题,介绍了VMS的发展历程,阐述述了VMS逐渐使用广泛的必然性,论述了VMS组成及结构,并参考了大数据和人工智能等技术,总结了VMS。最后,设计了计划站(PS),航行站(NS),驾驶指挥站(CS),并论证了VMS性能的优越性,概括了船舶航行管理系统的使用和显示等各个方面的信息。船舶航行管理系统中子系统里面还包括下面的模块:电子海图系统,自动航迹控制模块,中央指挥信息,航线计划和可选的入船坞等。这些模块可以大大地减少人为失误,减轻了船员的工作量和负担,将航海学的相关知识与先进的技术相结合,形成的一种特色的集成航行管理系统。通过对比国内外对于船舶航行管理系统的应用,进而发现其逐渐受到全世界的认可,并应用越来越广泛。本文将从现如今船舶航行管理系统的应用可以分析出其未来的发展前景以及规划。
关键词:船舶航行管理系统;大数据;人工智能;计划站;航行站
Abstract
This paper mainly focuses on the increasing demand of maritime, fishery and port departments for the ship navigation management system (VMS), introduces the development process of VMS, expounds the inevitability of the gradual use of VMS, discusses the composition and structure of VMS, and refers to big data and artificial intelligence technology, and summarizes VMS. Finally, the planning station (PS), navigation station (NS), driving command station (CS) are designed, and the superiority of VMS performance is demonstrated, and the use and display of ship navigation management system is summarized.The ship navigation management system subsystem also includes the following modules: electronic chart system, automatic track control module, central command information, route plan and optional entry dock, etc. These modules can greatly reduce human error, reduce the workload and burden of the crew, and combine the relevant navigation knowledge with advanced technology to form a characteristic integrated navigation management system. By comparing the application of ship navigation management system at home and abroad, it is found that it is gradually recognized by the world and more and more widely used. This paper will analyze the future development prospect and planning from the application of the current ship navigation management system.
Key words: ship navigation management system; big data; artificial intelligence; planning station; navigation station
1绪论
1.1研究背景及意义
进入了21世纪,我国经济得到了快速、稳步的发展,航运业在进出口商业往来不断上升的背景下也得到了快速发展[1]。船舶总数在不断上升的同时,吨位也随之不断的增加,航运业的繁荣促进了船舶进出口数量的增加[2]。由于船舶数量的增加,船舶作业的水域难免会变得越来越浅、越来越窄[3]。这种情况对船舶的操纵性能给予了更高的考验。当前大型船舶需要更准确的导航,先进的船舶导航管理系统几乎已成为船舶不可缺少的重要技术手段[4]。
航次计划的内容因船舶和海洋环境的不同而不同,但是总的来说,万变不离其宗。具体还应该包含资料的编写、航海图书和开航前的校正[5];各种助航设备的维修和启动;完成人员配备和装卸计划;供应淡水、燃油及生活必需品;路线的决心;航行时间和通过重要水域时间的计算[6];研究重点水域或狭窄航道通航的规律;大洋航行中大圆航线起讫点的选择;航线在某一海域可能会遇到的海况和恶劣天气;到港概况、通信、引航、航道特性等[7]。
针对上述问题,本文探讨了一个船舶乘客管理系统。船舶开航前,所有指定旅客应按计划信息到指定港口报到。
1.2研究现状
随着科技的发展,船舶设备的配备也不断地提高,人工智能也不断优化,航行管理技术水平也逐步提升,导致了一部分船员过分依赖先进的船舶航行管理系统[8]。
航运事业的稳步发展,导致了船舶所处的环境复杂多变,同时伴随着各种危机船舶和人身安全,财产安全,环境保护等一系列问题[9],为了避免出现这样的问题,把损失的比重降到最低,每艘船舶都被要求去定期做演习,达到所有船员明确自己的岗位,责任和所负责的情况[10]。随着船舶检查越来越严格,越来越规范,很多船舶都配备了应急预案,然后还有很多船舶没有定期、及时地进行演习和训练,使得应急预案毫无意义[11]。以上研究针对性不足,但为本文提供了依据。
1.3主要研究内容
了解各个子系统的分工;对子系统不同领域的分析;总结早期文献关于船舶航行管理系统发展与应用的相关资料,分析了在船舶航行管理系统作用下的船舶动态信息,结合上面所提到的情况并提出一些关于提高船舶航行管理系统功能最有效的方法;提出相应的方法和意见。
1.4研究方法
寻求文献方法:通过图书馆和网络查阅相关资料,通过对研究内容的分析和对资料的掌握,更全面地了解了研究内容的背景,情况和相关的资料信息等,对所掌握的资料进行分析编排和总结归纳。
2计划站(PS)
2.1ECDIS显示
电子海图显示与信息系统(ECDIS)是如今航海中使用频率高的名词之一[12]。它被认为与雷达等设备同等级的设备。从最初的纸质海图到现如今的电子海图,也体现出了我国科技突飞猛进的发展和航海业的进步[13]。它不能能够实时监控和给出船位,还能为船舶提供各种相关信息,很大程度上有效地避免和防范各种险情[14]。随着电子海图系统在全世界广泛使用,历经几个世纪的传统的纸质海图注定是要被淘汰的[15]。
2.1.1ECDIS的功能
1.ECDIS的显示功能
使用特定的投影,从而显示相应的电子海图,以真向上或北向上来显示所观察物标或该船舶的方向,以相对运动或者真运动的方式来显示运动轨迹。通过改变比例尺的大小,从而达到了观察指定物标的目的和要求。
2.ECDIS作业正确的路线设计,计算任意两点之间的距离、方位角和两点间的相对方位角,画出船位、航迹、时间等[18]。
3.ECDIS改正
通过主管部门,导航员从航行通告和航行警告中提取的改正数据,可以指导飞行员人工或自动改正电子海图。
4.定位及导航
能够与计程仪,陀螺罗经,GPS,测深仪等设备相连接,通过传输的数据来计算出最佳航线,为船舶进行正确的定位以及合理的导航。
5.航海信息咨询
通过获取电子海图信息和航海信息,如潮汐、天气等,以及船舶所需要的一些相关资料和书籍,如航线指南,航海通告,灯标雾号表等。
6.航行监控
在船舶导航过程中,电子海图可以向驾驶员提供并显示偏航距离,必要时进行提示和报警,实现船舶在计划航线上的实时导航。电子海图显示系统也可以自动使用,实时全面地对船舶周围的环境进行检测,如:浅滩,交通管制区,禁航区,禁锚区,事故多发区域等等,有效地避免了碰撞,搁浅,触礁等重大事件和危险情况。
2.1.2推进电机船舶电力推进系统
推进电机是产生推进动力的装置。推进电机通常选择感应电机、超导电机或永磁电机。随着科技水平的不断进步,永磁电机控制技术日渐成熟,由于它的功率和转矩均高于常规电机,功率调节范围非常宽,具有效率高,噪音低,维护方便的优点,所以永磁电机在船舶上的大量使用成为一种趋势。变频调速装置既是船舶电力推进系统的中最重要的部位,也是电力推进方式相对于传统推进方式优势的部位。系统若要正常运行变频调速装置是不可或缺的组成部分。变频调速装置在使用的同时必须要减少对系统的电磁干扰,这对控制系统的精确控制具有重要意义。
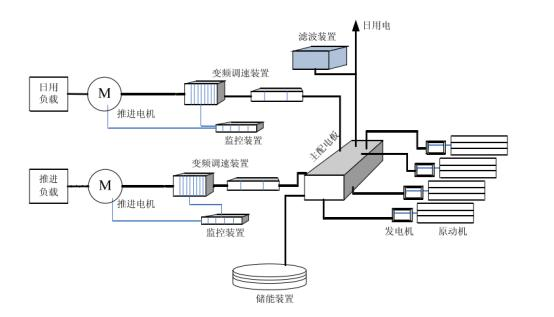
图2-1船舶电力推进系统结构图
2.2航线设计的形成
航线设计要求安全,经济,周密,高效等。船舶定线系统:在航道拥挤、航路复杂的水域,为将海上事故率降到最低,任何由单航线或多航线系统和航线分配方式组成的航线系统,如车道分隔系统、双向航线等。
2.2.1航线设计前的准备工作
1.航海图书总目录:用于查找与航海有关的图书资料。
2.世界的海洋航线为np136:航线使用、推荐航线介绍及导航方法,还有注意事项等,都算作世界航海航线的主要内容。这也是航海航线的主要参考依据,特别是两位船长没有经过的海域,不过也只是作为一项参考,具体的还要参考最新的资料显示。
3.航线指南:是航图资料、沿海航行和窄航道航行的重要参考。
如东北通道是指从欧洲和北大西洋开始,沿挪威和俄罗斯在北冰洋的沿海水域航行到太平洋的几条海路。随着北极海面覆盖冰层范围与厚度的逐渐缩小,北极航道的航运潜力将进一步得到大幅度的提升。北极东北航道是连通北大西洋和北太平洋的最快最佳航道,其大幅度的减少了东北亚到欧洲地区的实际航行距离,比最初的经过马六甲海峡和苏伊士运河的航路节省了约1/3的实际航行路程。东北通道所在的水路地区的海岸线形状非常曲折,形成许多低海和宽阔的海滩和处在边缘的海滩,沿海存在许多的岛屿,其中一些相对较浅,并且是由湿地,湖泊和大片地区沼泽融化时形成的。总的来说,东北航道的路线相对简单。周围岛屿数量相对其他航路较少,虽然少数区域出现水深较浅情况,但整体航路环境良好,适宜船舶航行。东北航道的示意图如图2-1所示。
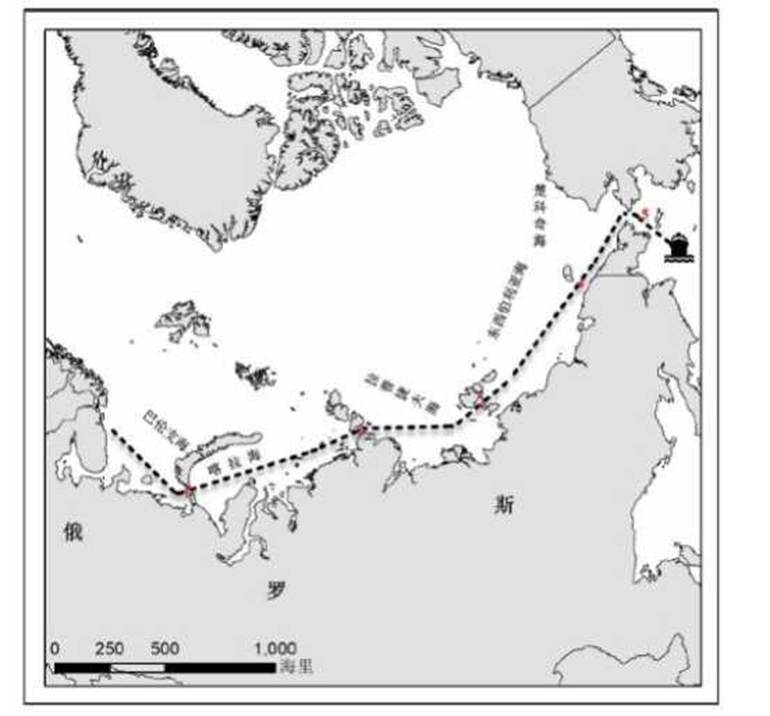
图2-2东北航道示意图
4.灯雾信号一览表:详细描述了世界各地各种灯雾信号的信息。
5.潮位表和潮位表:介绍世界各港口潮位和海峡潮位。
6.无线电信号表:阐述了有关通信方面的一些说明。
7.进港指南:详细的阐述了全世界各个重要港口的所有信息和具体停靠要求等。
2.2.2计划航线的选择与绘制
航线设计一般分为大洋航线和沿海航线。
一、大洋航线:指的是远离海岸的航线。1.大洋航线是离岸远,而且气象变化大,海绵状况不稳定,海况很难预料,发生海难几率大。2.航海路线长,受海上气流环境等的影响多。3.轮船驾驶员不熟悉地形,驾驶本片海域没有经验,只能参考相关资料。4.面积较大,水较深,障碍物较少,有更多的选择性。
针对大洋航线的上述特点,我们应该选择一条安全经济的航线。我们可以通过恒向线航线,等纬圈航线,大圆航线,混合航线等来做出一条最优的大洋航线。
二、靠近海岸的航线就是沿岸航线。
1.沿岸航线的特点是离海岸较近,来往船只很多,障碍物多且环境复杂需要进行避让操作。
2.有较多的物标来进行船舶的定位,定位更容易。
3.海图资料较完整,有较大的比例尺,更详细地描述了该航线上的各种复杂情况。
3航行站(NS)
3.1航线计划评估
3.1.1航线计划评估的基本使用方式
航线计划是指从起始港到目的港过程中的有关航行安全的方法和计划。航线计划所涉及的领域广,内容复杂,要求严格,要与航行过程中的所处情况和现状相结合,充分地利用所学的有关航海学及海洋与船舶的相关知识。不但要保护海洋环境,合理使用开发海洋资源,更要保护所有船员的生命安全。
航线计划评价是指船长、引航员和有关人员在开航前,根据船舶状况、航行环境、人员素质和能力,对船舶航线的适宜性进行评价。
(1)对本船条件的评估:
一、续航力:指的是船舶在不靠泊或者不依靠补给的情况下所能够行驶的路程。主要包括:发动机持久性;辅机的持久性;润滑油的持久性;淡水持久性(家用和辅助锅炉冷却);食物的储存性。
二、航行区域的等级划分:等级可以在船体分级证书中找到。不同层次对船舶结构、稳性、救生设备和无线电设备有不同的要求。不同级别的船舶会受到不同航行区域的限制。路线设计不得超过规定的海上距离。
三、船员适任证书中的航区限制:不同的船员适任证书适用于不同的航区。如:甲类是远洋,丙类是近海。
四、保险条款中的航区限制:一般保险人不同意承担船舶进入冰区,是因为有很大的风险,船舶被禁止进入冰
区在保险单上都有体现。保险条款上有说明,没有附加战争险的船舶是不可以进入其他指定区域的。前提是战争或者有可能发生战争的前提之下。
五、船舶尺寸:长度、宽度、最大高度等。
六、船舶设备:一般情况下,如果没有配备相关设备,不建议设计穿越运河的路线。
七、技术状况:旧船、老船、常年失修的船,或者发生事故才临时修理的船舶,以及船员航海技术不达到一定水平的船舶,应当选择风浪影响较小的航线。
八、载荷条件:船舶满载和空载时的吃水、稳性、风区和操纵性都会有一定的变化。船舶是否进行了良好的封舱、货物的绑扎系固情况等,都是应该考虑的因素。
九、其他因素:书籍、设备、风阻等。
(2)对气象的评估:
潮流,大风,季风,浓雾,暴雨,冰况以及异常涌流等。
(3)对海岸、岛屿及水下障碍物的评估:
一、水下有海床上的桩、弃锚、水泥沉块、柱、管、沉船等障碍物,称作水下障碍物。
二、没有经过精细测量的水域与可能存在的浅点等。
三、暗礁。
3.2自动航向控制
舵机和舵叶组成的叫做舵机。直接控制系统(单舵系统、紧急转向)、自动转向控制系统(自动航向稳定系统)、随动控制系统、自动航路控制系统(自适应航向控制系统),叫做控制系统。当自动驾驶仪,它配备偏航报警,这是一般±8°~±10°。传统的自动驾驶仪通常采用电罗盘或磁罗盘来检测航向偏差,然后利用航向控制器来控制舵角来实现航向修正。船舶在长时间后也会出现单边的偏航。在实际航行途中,普遍根据合适的舵角对偏离的航向进行人工的修改。自动驾驶仪中常见的调节步骤包括:舵角按比例调节,舵角的反方向调整,灵敏度调节,天气调节,调节规律是:航行状况良好,则灵敏度高;航行状况较差,那么灵敏度低。航向调节:主要是自动航行下的改变航向。指南针和旋钮匹配。自动、被动、紧急情况下的转向转换控制开关和航向警报按钮是静音的。
船舶自动舵常用的电路有:
一、相敏整流电路:
晶体管调制解调器,环形相敏整流电路,整流桥式相敏整流电路,运算放大器相敏整流电路共同组合成了相敏整流电路
二、灵敏度调整电路
三、比例,微分,积分电路
3.3速度导航仪
船舶速度导航仪是为了更清晰地了解船舶航行,由于更新及时,可以进一步确保船舶的航行安全。随着导航仪不断更新升级,其操作也越来越简单方便,有效地减少了船舶驾驶员的工作量。速度导航仪特点:
1.高端工控电脑:保障运行稳定,提高操作速度。
2.接口多,可以连接所有外接设备。
3.内设GPS和无线网络模块,可随时调节定位精度。
4.前面板:310*246*56mm,12.1/17寸液晶。
速度导航仪的硬件接口非常多,有效地接通了所有的外接设备,包括:电源,GPS,网络天线,VGA,鼠标键盘,COM1,网口,预留数据接口,COM2,USB*4,SIM卡卡槽等。
速度导航仪的遥控操作如下:
1.主机挂起后,所有可由遥控器远距离实现完成。2.开关机,亮度调节,启动主程序等经常性操作设置快捷键,额外预留四个功能键,以供设置。3.由遥控器进行简单操作,减少人为误操作的风险。
与速度导航仪所配套的设备具有以下特点:
1.金属外壳,结实牢靠,散热性强。
2.工程塑料外箱和泡沫内衬,有效地保障了携带和运行。
3.可外接鼠标,键盘,遥控器,电源线,GPS天线,电缆等。
4.推荐采用镶嵌安装或者挂式安装。
速度导航仪包括水上导航终端,其特点有:
1.速度导航仪内部有测量型的GPS,GPS的定位的精准度为1~3M,误差几乎可以忽略不计,因为误差是以亚米和分米为计量单位的。
2.外壳为金属材料,不但结实,而且体积小,重量轻,操作方便。
3.内部含有无线通信模块,只要有网络信号就能够连接上网。
4.遥控器的操作,大大的减少了人为操作失误的风险,操作变得简单。
5.电子航道图的更新更加快速,实时。
6.按照规范可以定制的软件功能。
7.终端的扩展性能更强。
3.4雷达数据交换
雷达的主要作用就是:发射的脉冲是微波的,探测目标的回波,显示出物标的信息。雷达探测到的目标可以是船、岛、浮标、海浪,雨雪和云雾等,雷达可以直接测量他们的位置或者距离,也可以通过计算测量真速度、CPA、真航路、TcpA等。雷达的工作原理是通过超高频无线电波传播在发射和目标间反射,勘测距离。
雷达是单支线传播发射雷达信号,指定方向发射雷达波,再接收此方向折射回来的信号确定目标所在。天线旋转一档发射一次雷达波,它能探测到附近物体的位置——天线的方向就是目标的方向。
收发开关、发射器、天线、定时器、接收器、显示屏和电源,共同组合成了雷达。发射器是由脉冲调制器、磁控管振荡器和电源(高低压)组成。
雷达显示系统包括模拟系统和数字系统。其显示方式分为:
1.弓线方向:弓向上,正北向上,朝上。
2.扫描中心(起始点)运动方式:相对运动,真运动。
3.扫描中心(起点)位置:中心显示,偏心显示。
雷达还有一些附属装置来辅助雷达,比如:雷达系统互换装置,雷达性能监视器等。
正确操作雷达的方法为:
1.准备工作要提前做好,要检查各项设备是否正常运作,并是否都已经到位。是否有妨碍发射的障碍物,一切准备就绪才可开机。检查船舶开关是否关闭。2.开机:先将雷达开关置于待机状态,等待3分钟,然后将其设置为on,要调整扫描线和增益达到各自的标准点,调整调谐使调谐指示的偏转达到最大量,或者图像最大且最亮,最清晰、最饱满3.关机:先将雷达开关置于STAND-BY,确保所有开关都处于关闭状态,最后将雷达开关置于关闭状态。用完雷达后,还需要对雷达进行定期的修养和维护。不同的零件有着不同的修养维护的规定:
一、天线系统:辐射窗半年拿水或抹布清洗一次,切忌用除了酒精的其他清洁剂去清除污渍。半年检查一次天线插座、与仪器的连接完好和水密性完好。半年除锈、清理油漆一次,天线辐射窗上不允许有油漆。不要将波导管撞上,不能发生变形,开裂等现象。齿轮箱应该定期地注入防冻裂的润滑油。
二、收发器:检查电缆的接头三个月一次。检查并测试仪器上的数据间隔不超过三个月,并在检查完毕后半小时后启动。半年清理一次箱子里面的灰。确保收发机正常,回波可以很明显地减弱。检查波导管中有没有水。如果更换主要零件,确保调试好或者试过可用后方可使用,并保持记录。
三、监控:清洗内部灰尘半年一次。用干抹布擦净筛面上的灰尘。检查电缆连接,并确保正常。旋转线圈型应该按照规定定期地进行涂刷油料、去污等。高压帽点燃后,放电清洗。
本站文章通过互联网转载或者由本站编辑人员搜集整理发布,如有侵权,请联系本站删除。